Inteligencia artificial en robótica
Por Israel Pérez Valencia
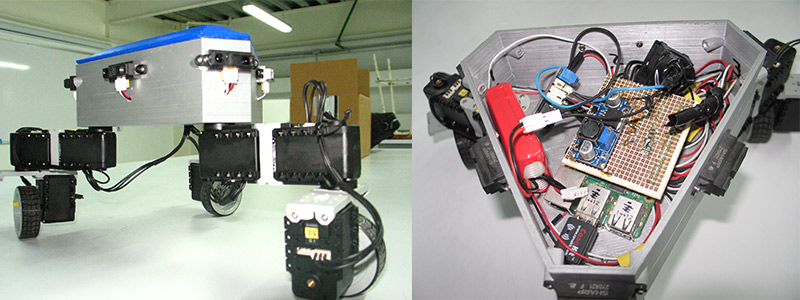
Santiago de Querétaro, Querétaro 28 de noviembre de 2017 (Agencia Informativa Conacyt).- Investigadores del área de Inteligencia Artificial de la Facultad de Ingeniería de la Universidad Autónoma de Querétaro (UAQ), diseñaron el prototipo de un robot móvil omnidireccional, que mediante algoritmos y una interfaz de operación, le permiten el aprendizaje, planeación y control de movimientos.
El diseño y programación de este robot estuvo a cargo del egresado del doctorado en Ingeniería de la UAQ, Daniel García Sillas con la asesoría del profesor investigador de esa facultad, Efrén Gorrostieta Hurtado, quien aseguró que este prototipo de robot busca introducir herramientas de inteligencia artificial para hacerlo más autónomo, capaz de aprender y planear movimientos determinados.
 Dr. Efrén Gorrostieta Hurtado."Esta es la quinta versión hablando del diseño del robot, la idea principal era hacer un diseño omnidireccional que tuviera brazos con aplicaciones de algoritmos de inteligencia artificial. Principalmente se trabajaron algoritmos de aprendizaje, que en este caso fue evasiones de obstáculos y planeación, donde el robot tiene que buscar una trayectoria muy específica con ciertos criterios de optimización. Se le enseñaron algunos movimientos y que aprendiera de experiencias al chocar con obstáculos".
Dr. Efrén Gorrostieta Hurtado."Esta es la quinta versión hablando del diseño del robot, la idea principal era hacer un diseño omnidireccional que tuviera brazos con aplicaciones de algoritmos de inteligencia artificial. Principalmente se trabajaron algoritmos de aprendizaje, que en este caso fue evasiones de obstáculos y planeación, donde el robot tiene que buscar una trayectoria muy específica con ciertos criterios de optimización. Se le enseñaron algunos movimientos y que aprendiera de experiencias al chocar con obstáculos".
Gorrostieta Hurtado indicó que este proyecto, apoyado por el Fondo de Proyectos Especiales de Rectoría (Foper) corresponde a la tesis doctoral del estudiante Daniel García Sillas, responsable del desarrollo de todos los algoritmos y el diseño del último prototipo con el apoyo de estudiantes de la maestría en Inteligencia Artificial, quienes darán continuidad a este trabajo de investigación.
"Este robot que se desarrolló partió de versiones anteriores, tenemos otro parecido que se construyó sobre una base triangular y un brazo para que tuviera más movilidad. La nueva versión cuenta también con la opción de hacer movimientos por medio de una computadora que está fuera del sistema interno, algunos de los algoritmos mencionados los trabajamos en ella, pero el trabajo principal está dentro del robot en sí".
Aprendizaje y toma de decisiones
Gorrostieta Hurtado mencionó que el desarrollo de este robot motivó la publicación de artículos científicos sobre inteligencia artificial y aprendizaje.
“Se tienen publicados dos artículos sobre este trabajo y actualmente se encuentran otros tres en proceso de revisión. Es importante relacionar la inteligencia artificial y la robótica porque han estado de la mano desde siempre; cuando se hicieron los primeros intentos de robótica surgió la necesidad de darles un poder de decisión para ciertas tareas o características que se requerían. Esto los vemos mucho en las historias de ciencia ficción donde a los robots se les da una cierta capacidad de aprendizaje y decisión”.
Indicó que los algoritmos de inteligencia artificial resultan fundamentales para resolver la problemática constante en el manejo de un robot, que son sus sistemas altamente no lineales.
“La inteligencia artificial va mucho más allá de la parte de robótica, implica también el manejo de grandes datos (Big data) procesamiento de lenguaje natural que mejoran el desempeño. Uno de los trabajos más importantes en el área es un programa informático de inteligencia artificial desarrollado por Google DeepMind, Alpha Go, para jugar al juego de mesa Go, que es más complicado en el desarrollo de algoritmos que el ajedrez", finalizó.


![]() • Dr. Efrén Gorrostieta Hurtado
• Dr. Efrén Gorrostieta Hurtado
Profesor investigador de la Facultad de Ingeniería
Universidad Autónoma de Querétaro (UAQ) Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.


Esta obra cuyo autor es Agencia Informativa Conacyt está bajo una licencia de Reconocimiento 4.0 Internacional de Creative Commons.
