Diseñan prototipo de robot tortuga para acuicultura
Por Joel Cosío
La Paz, Baja California Sur. 5 de febrero de 2016 (Agencia Informativa Conacyt).- Estudiantes de ingeniería en tecnología computacional de la Universidad Autónoma de Baja California Sur (UABCS) desarrollaron un robot inspirado en una tortuga marina para aplicaciones en acuicultura.
 El prototipo genera datos referenciados de ubicación mediante un receptor de sistema de posicionamiento global (GPS, por sus siglas en inglés) y de temperatura, por medio de sensores. A través de un microcontrolador Arduino Uno se procesa la información recolectada en los estanques de acuicultura, que permite el monitoreo y control de las condiciones óptimas para el desarrollo de los organismos; además el sistema se compone de un módulo de memoria de acceso aleatorio (Random Access Memory, RAM) y sistema Bluetooth, con los que se puede controlar por medio de dispositivos móviles y computadoras de escritorio.
El prototipo genera datos referenciados de ubicación mediante un receptor de sistema de posicionamiento global (GPS, por sus siglas en inglés) y de temperatura, por medio de sensores. A través de un microcontrolador Arduino Uno se procesa la información recolectada en los estanques de acuicultura, que permite el monitoreo y control de las condiciones óptimas para el desarrollo de los organismos; además el sistema se compone de un módulo de memoria de acceso aleatorio (Random Access Memory, RAM) y sistema Bluetooth, con los que se puede controlar por medio de dispositivos móviles y computadoras de escritorio.
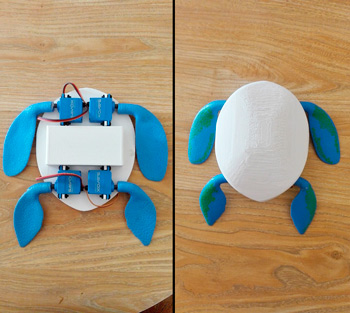
El sistema de locomoción de la tortuga robot, diseñado por Israel Barrera Romero e Isaac Daniel Durán Encinas, está integrado por cuatro servomotores programados a través de un portal web especializado del microcontrolador, en el que se dan indicaciones de movimientos que imitan a una tortuga marina en tiempo real.
“Se puede obtener una temperatura georreferenciada, a diferencia de un sensor de temperatura fijo, este se puede mover con el sistema de locomoción que posee, lo que permite tomar temperatura en diferentes puntos, principalmente en estanques de acuicultura”, explicó Durán Encinas a la Agencia Informativa Conacyt.
 Las piezas que componen el prototipo fueron diseñadas y fabricadas con una impresora tridimensional. Actualmente, los desarrolladores están integrando algoritmos de lógica difusa que permitan mayor autonomía al programar rutas de desplazamiento.
Las piezas que componen el prototipo fueron diseñadas y fabricadas con una impresora tridimensional. Actualmente, los desarrolladores están integrando algoritmos de lógica difusa que permitan mayor autonomía al programar rutas de desplazamiento.
“Algunos sistemas están completos, la idea es que este robot pueda ser en su mayor parte autónomo y podamos programar rutas para que no dependa de una persona que esté dando indicaciones en tiempo real”, comentó Durán Encinas.
La tortuga robot fue diseñada a partir de la necesidad de biólogos marinos e investigadores oceanográficos de recolectar datos de parámetros específicos de las condiciones del mar que son de utilidad en investigaciones oceanográficas.
Actualmente se utilizan sondas sumergibles que recaban datos de temperatura y posicionamiento; sin embargo, están conectadas a un cable que limita su movilidad, por lo que los estudiantes no descartan la posibilidad de mejorar el robot para que pueda ser utilizado en mar abierto.
 Descargar imágenes
Descargar imágenes

Esta obra cuyo autor es Agencia Informativa Conacyt está bajo una licencia de Reconocimiento 4.0 Internacional de Creative Commons.
