Estudiantes crean robot móvil teleoperado
Por Érika Rodríguez
Zacatecas, Zacatecas. 21 de octubre de 2015. (Agencia Informativa Conacyt).- Con apoyo del Consejo Zacatecano de Ciencia y Tecnología (Cozcyt), un equipo de estudiantes de la Unidad Profesional Interdisciplinaria de Ingeniería del Instituto Politécnico Nacional, Campus Zacatecas (IPN UPIIZ) fabricaron un robot móvil teleoperado de locomoción híbrida para exploración de terrenos irregulares.
El equipo que realizó la investigación y consecuente realización del robot está conformado por Edgar Eduardo Haro Campos, Omar Moctezuma Barraza, Ulises Muro Barajas y Juan Martín del Río Chacón, bajo asesoramiento del doctor Miguel Ángel Moreno Báez y del maestro Fernando Olivera Domingo.
En entrevista exclusiva para la Agencia Informativa Conacyt, el ingeniero en Mecatrónica Juan Martín del Río Chacón compartió a detalle las propiedades que dicho robot ofrece al usuario, describiéndolo como una herramienta interactiva, práctica, didáctica, así como fácil de operar y maniobrar, ya que se puede controlar a distancia.
"El prototipo que nosotros hicimos sirve para alentar a la población zacatecana. Nosotros nos propusimos este reto porque tenemos la fiel convicción, así como lo ha expuesto en  muchas ocasiones la doctora Gema Mercado, de que el talento está tanto en otros países como aquí en México. Nosotros siempre tuvimos su apoyo tanto económico como moral y por eso pudimos llevar a cabo este proyecto. El Cozcyt nos dio la oportunidad de hacerlo", señaló.
muchas ocasiones la doctora Gema Mercado, de que el talento está tanto en otros países como aquí en México. Nosotros siempre tuvimos su apoyo tanto económico como moral y por eso pudimos llevar a cabo este proyecto. El Cozcyt nos dio la oportunidad de hacerlo", señaló.
Asimismo, comentó que uno de los servicios que brindará esta herramienta interactiva será el ser expuesta durante las actividades del Centro Interactivo de Ciencias Zig Zag realizadas continuamente en las comunidades de la región zacatecana, en donde niños, jóvenes y adultos podrán hacer uso del robot.
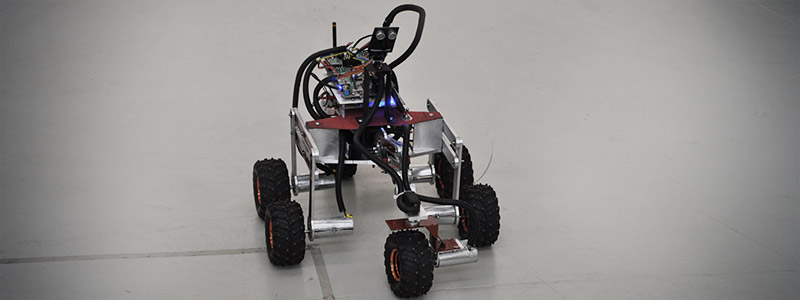
El ingeniero Juan Martín del Río describió su prototipo como un robot de movilidad bastante accesible, ya que cuenta con seis llantas de uso rudo, lo que le permite mantenerse estable e incluso rotar sobre su propio eje, girando con base en grados. Además es teleoperado, ya que puede ser controlado por el usuario incluso a una distancia de hasta 200 metros al aire libre, supera obstáculos de hasta 20.4 centímetros de altura, correspondiente a 1.7 veces la altura de las llantas, todo esto alcanzando a su vez una velocidad máxima de cinco kilómetros por hora.
Anatomía del robot
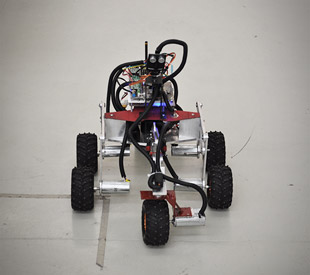 El prototipo se divide en varias partes, la primera es el chasís, que es el armazón que sostiene un motor y la carrocería de un vehículo. El chasís del prototipo está diseñado y maquinado sobre material de aluminio, que es el material que cumplió con los lineamientos de masa, ya que a diferencia de materiales más pesados como el acero, el aluminio no se oxida, es más ligero y económico; además de que resulta maleable al momento de ser maquinado.
El prototipo se divide en varias partes, la primera es el chasís, que es el armazón que sostiene un motor y la carrocería de un vehículo. El chasís del prototipo está diseñado y maquinado sobre material de aluminio, que es el material que cumplió con los lineamientos de masa, ya que a diferencia de materiales más pesados como el acero, el aluminio no se oxida, es más ligero y económico; además de que resulta maleable al momento de ser maquinado.
Las llantas fueron obtenidas con base en un estudio de criterio de selección acerca del mejor prototipo en ámbito mecánico, por lo que se decidió por llantas de uso rudo. Para el resto de los materiales se consideraron términos también de tipo mecánico, así como práctico. A excepción de la cámara y las llantas, cada uno de los eslabones y piezas que conforman el robot fueron maquinados en la UPIIZ, sobre aluminio traído de Aguascalientes. Para ello, fueron utilizados tornos y fresadoras de tipo RC.
Cerebro electrónico
La parte electrónica tiene que ver con todos los componentes electrónicos que permiten a los microcontroladores realizar su tarea. Entonces los realizadores del robot diseñaron, construyeron y llevaron a cabo las pruebas pertinentes dando como resultado las tres placas que componen el robot. En ellas están distribuidos los microcontroladores esclavos y el esclavo maestro (cerebro central). Para diseñarlas utilizaron un software llamado Eagle, que es el que permite diseñar tarjetas de circuito impreso. El cerebro central está compuesto por un Arduino Mega 2560.
La parte de control se relaciona con todo el desarrollo que se lleva a cabo para que el cerebro central envíe a los microcontroladores esclavos la información a una velocidad de tiempo real por medio de un control, realimentando los motores y estos puedan responder. Esto es para que cuando los controles envíen la señal de aumentar la velocidad, ir más lento o frenar, se obtenga una respuesta en tiempo real y se prevenga algún daño al robot, provocado por objetos peligrosos.
Todo este proceso se lleva a cabo para que el cerebro central emita la señal a los microcontroladores esclavos y viceversa, ya que la comunicación entre el usuario y el robot es bidireccional, o sea, el usuario envía una señal de la velocidad solicitada y el robot contesta que efectivamente ya va a esa velocidad.
Locomoción
 Esta comunicación conecta el robot con la computadora y viceversa. La comunicación se lleva a cabo por medio de unas tarjetas llamadas XBee Pro, que tienen un alcance de 600 metros al aire libre. Esto es lo que permite la comunicación teleoperada.
Esta comunicación conecta el robot con la computadora y viceversa. La comunicación se lleva a cabo por medio de unas tarjetas llamadas XBee Pro, que tienen un alcance de 600 metros al aire libre. Esto es lo que permite la comunicación teleoperada.
El protocolo de comunicación utilizado es el nombrado I²C, en el cual el usuario realiza indicaciones de velocidad al cerebro central y este a su vez emite la señal a los esclavos. Los esclavos lo señalan al motor y el motor responde trasladándose a la velocidad indicada inicialmente por el usuario, quien lo comprueba visualmente a través de la pantalla.
El grado de inclinación del control por parte del usuario es lo que indica la velocidad. El control utilizado es de Play Station 3, lo cual genera que la secuencia de comandos sea muy intuitiva, ya que está basada en el juego de Grand Theft Auto: San Andreas, utilizado en los años 90 e inclusive por algunas personas en la actualidad.
Energía
Los motores utilizan bastante energía a diferencia de los componentes electrónicos, razón por la cual los dos tipos de alimentación deben de ser separados y regulados. Los componentes electrónicos son todos los capacitores que utiliza el cerebro central para funcionar, como lo son los cristales de cuarzo. El cerebro central piensa y envía la señal a los motores, que están aparte.
Los motores son alimentados por una batería llamada NiMH de 12 voltios y 10 mil amperios por hora; mientras que los componentes electrónicos se conectan a la batería nombrada Lipo de 11.1 voltios y dos mil 700 amperios por hora.
Sensores del robot1. GPS Por medio del GPS se permite ver la localización del robot en un mapa de Google, siempre y cuando se cuente con señal de Internet al alcance de la antena. En él aparece un pequeño mapa dentro de la misma interfaz, también diseñada por uno de los miembros del equipo. 2. Sensor ultrasónico para detección de objetos Con este sensor se detectan objetos por medio de resonancia. Los objetos ubicados cerca del robot envían un pulso y este lo recibe. El tiempo que tarda en recibir y emitir la señal es proporcional a la distancia en que se encuentre el objeto. En caso de no haber objeto alguno, la señal es rebotada y, por ende, indetectable. 3. Cámara La cámara que posee el robot tiene dos grados de libertad, puede moverse hacia arriba o abajo y puede girar. Esta acción permite al usuario tener un amplio grado de visualización para la manipulación del robot, ya que la cámara es inalámbrica y transfiere la señal hacia la computadora por medio de una antena; entonces el usuario va monitoreando todo lo que ve la cámara, en tiempo real. 4. Interfaz En ella se presenta al usuario la situación presente del robot. En esta ventana se observa un esquema en donde se visualiza la captura de la cámara y la velocidad a la que va el robot. Los comandos que generan esta información son los ofrecidos por la cámara y el sistema electrónico; pero esos comandos son interpretados y mostrados de una manera entendible para el usuario a través de la pantalla. |

Esta obra cuyo autor es Agencia Informativa Conacyt está bajo una licencia de Reconocimiento 4.0 Internacional de Creative Commons.
