Un péndulo invertido en IPN Zacatecas
Por Érika Rodríguez
Zacatecas, Zacatecas. 12 de julio de 2018 (Agencia Informativa Conacyt).- Cohetes, satélites, robots bípedos, bicicletas autónomas y otras máquinas tienen incorporado a su sistema un péndulo invertido, que es el que les ayuda a mantener determinada posición durante su actividad, respecto a una rueda de inercia. Un péndulo invertido con rueda inercial comercial tiene un costo de aproximadamente ocho mil dólares, mientras que en la Unidad Profesional Interdisciplinaria de Ingeniería, campus Zacatecas, del Instituto Politécnico Nacional (UPIIZ IPN), un equipo de estudiantes de ingeniería construyó un prototipo con aproximadamente 14 mil pesos.
Los hoy ingenieros en mecatrónica Julián Alejandro Hernández Gallardo y Jesús Eduardo Pacheco Villegas trabajaron durante un año en este proyecto, como trabajo terminal de titulación, con apoyo financiero del Consejo Zacatecano de Ciencia, Tecnología e Innovación (Cozcyt), y en especie por parte de sus asesores, el maestro en ciencias Omar Désiga Orenday, el maestro en procesos y materiales Jorge Talavera Otero y el maestro en ingeniería Carlos Cuevas Cortés.
“El propósito de este proyecto fue autoequipar a la UPIIZ, ya que es necesario contar con diversos prototipos para poner en práctica los conocimientos teóricos adquiridos en la escuela. Algo de lo que más nos motivó es que al revisar el estado del arte, no encontramos ningún péndulo invertido con rueda inercial que alguien haya construido durante la licenciatura, pues todos han sido hechos durante posgrados, como maestrías y doctorados; además, durante la licenciatura no vimos nada relacionado con sistemas no lineales, por lo que tuvimos que estudiarlo, y saber que nuestro proyecto era ambicioso académicamente también nos impulsó”, especificó Julián Hernández.
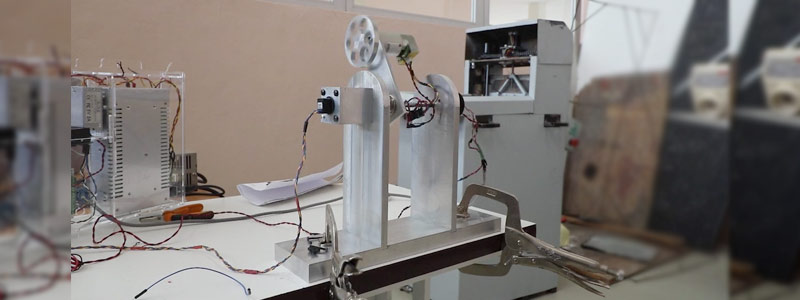
Este proyecto consiste en un prototipo de péndulo invertido con rueda inercial, un sistema subactuado no lineal, que por sus propiedades dinámicas, resulta uno de los más sencillos para ilustrar la aplicación de técnicas de control no lineal. Un sistema mecánico subactuado es aquel que cuenta con menos actuadores que grados de libertad. En este caso se tienen dos grados de libertad, que son el de la rotación del péndulo respecto a su eje de rotación y la rueda respecto al eje de rotación del motor. La rueda está actuada por el motor, pero el péndulo no está actuado directamente.
 Jesús Eduardo Pacheco Villegas y Julián Alejandro Hernández Gallardo.“La parte no lineal de este sistema se identifica a través del modelo matemático, este toma en cuenta masas, longitudes de centros de masas, fuerzas de gravedad e inercia y una función trigonométrica con respecto al ángulo de posición del péndulo. Este modelo, basado en potencias, funciones trigonométricas y ecuaciones diferenciales de segundo grado es diferente a lo lineal, que consta de operaciones matemáticas más simples, como suma, resta, multiplicación y división”, expuso Jesús Pacheco.
Jesús Eduardo Pacheco Villegas y Julián Alejandro Hernández Gallardo.“La parte no lineal de este sistema se identifica a través del modelo matemático, este toma en cuenta masas, longitudes de centros de masas, fuerzas de gravedad e inercia y una función trigonométrica con respecto al ángulo de posición del péndulo. Este modelo, basado en potencias, funciones trigonométricas y ecuaciones diferenciales de segundo grado es diferente a lo lineal, que consta de operaciones matemáticas más simples, como suma, resta, multiplicación y división”, expuso Jesús Pacheco.
Un ejemplo de control lineal es el calentamiento de un bóiler, en donde se prende el fogón, que entra en contacto con el recipiente de agua elevando su temperatura hasta que este alcanza una temperatura deseada.
¿Cómo fue construido este péndulo invertido?
Luego de efectuar una revisión bibliográfica para conocer los diferentes prototipos previamente construidos, el equipo de estudiantes de la UPIIZ seleccionó los diversos métodos que podrían emplear para su construcción, a la que le implementaron su propio aporte. “En esta revisión bibliográfica encontramos varios autores mexicanos, de los cuales el trabajo de dos egresados del IPN, el doctor Carlos Aguilar Avelar y el maestro en ciencias Carlos Alejandro Merlo Zapata, fueron nuestras principales referencias. Esto también nos entusiasmó, pues encontrar politécnicos en las referencias es motivo de orgullo e inspiración”, indicó Julián Hernández.
Julián Hernández Gallardo explicó que su metodología está basada en el diseño mecatrónico, mismo que consta de un proceso iterativo que no es secuencial, es decir, que durante la construcción del prototipo pueden ejecutarse pasos no necesariamente simultáneos. “En un proceso iterativo podemos hacer un paso para construir el prototipo y si, por ejemplo, el tercer paso no resulta, nos podemos regresar directamente al primero sin modificar el segundo. No se trata de un proceso secuencial”, especificó.
Para conocer el funcionamiento del sistema, el equipo estudió el modelo matemático que comprobó mediante simulación, que posteriormente los llevó al diseño mecánico —en donde propusieron el disco de inercia y un péndulo— y desarrollo del prototipo físico. La selección del motor fue uno de los pasos más importantes, debido a su costo y al tipo de funcionamiento que deseaban implementar en el sistema.
“Para la selección del motor, teníamos dos caminos: el primero era elegir uno al alcance de nuestras posibilidades y diseñar el prototipo; el segundo, que fue el que optamos, fue obtener los requerimientos del mismo para controlar el sistema a través del diseño del prototipo y de un controlador híbrido a través de la simulación. Con base en esto, se buscó proponer una metodología de diseño replicable y, a su vez, otorgar líneas generales para el diseño de sistemas similares”.
Modelo matemático–diseño mecánico
Estos pasos fueron realizados en la parte metodológica, el equipo ejecutó después la parte del diseño y la estructura, que culminó con la selección de componentes, en donde fueron incluidos los sensores necesarios para que la dinámica del sistema fuera capturada por una computadora —en eso consiste la selección de componentes—. En seguida fue construida la estructura mecánica, que es donde unieron los dos soportes y la base. Además del diseño y control, los ingenieros implementaron un diseño mecánico para seleccionar componentes como los rodamientos.
 “La parte pesada, pero más fácil, es la construcción del prototipo, en donde después de adquirir los materiales y ajustar detalles de la estructura, se procede a la manufactura, la cual fue realizada por nosotros en su totalidad y con el equipamiento de la UPIIZ. Cuando maquinamos todo, la última parte fue la programación. Diseñamos una interfaz gráfica para tener visualización de las señales del sistema por parte del usuario, así como variar los parámetros físicos del sistema y ganancias del control, permitiendo así una interacción total con el prototipo”, comentó Jesús Pacheco.
“La parte pesada, pero más fácil, es la construcción del prototipo, en donde después de adquirir los materiales y ajustar detalles de la estructura, se procede a la manufactura, la cual fue realizada por nosotros en su totalidad y con el equipamiento de la UPIIZ. Cuando maquinamos todo, la última parte fue la programación. Diseñamos una interfaz gráfica para tener visualización de las señales del sistema por parte del usuario, así como variar los parámetros físicos del sistema y ganancias del control, permitiendo así una interacción total con el prototipo”, comentó Jesús Pacheco.
El principal aporte de los entonces estudiantes de la UPIIZ a este proyecto es el diseño mecánico, ya que en la literatura relacionada con el péndulo invertido con rueda inercial, que comprende desde 1998 hasta 2017, únicamente localizaron información referente a la técnica de control implementada, sin exponer el diseño mecánico.
“Esto significa que los que lo construyen, en sus artículos y publicaciones científicas solo presentan la parte del control sobre la estructura final y no profundizan en el diseño mecánico, como lo hicimos nosotros, ya que seguimos una metodología para poder diseñar todo punto. Es importante aclarar que nosotros no propusimos algo nuevo, sino que replicamos técnicas de control previamente estudiadas por otros autores”, especificó Julián Hernández.
Este prototipo quedará como equipo de la UPIIZ, en donde a partir del siguiente semestre docentes y estudiantes de mecatrónica podrán utilizarlo con fines académicos y continuar con el proyecto para su perfeccionamiento.
“Además de haber aplicado todos nuestros conocimientos aprendidos durante la carrera, desde diseño mecánico y electrónico, manufactura, programación y control, áreas principales de la mecatrónica, algo de lo que más nos gustó de este proyecto es que cuando lo iniciamos, algunos profesores nos comentaron que era muy complejo, que era mejor construirlo en la maestría, pero nosotros creímos que lo podíamos lograr, por lo que verlo ahora finalizado es un motivo de orgullo. Con esta experiencia, lo que queremos compartir con los jóvenes estudiantes es que se animen a hacer cosas difíciles, pues el aprendizaje es invaluable”, concluyó Jesús Pacheco.

![]() • Ing. Jesús Eduardo Pacheco Villegas
• Ing. Jesús Eduardo Pacheco Villegas
![]() Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
![]() Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
• Ing. Julián Alejandro Hernández Gallardo
![]() Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
![]() Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
 Descargar fotografías.
Descargar fotografías.

Esta obra cuyo autor es Agencia Informativa Conacyt está bajo una licencia de Reconocimiento 4.0 Internacional de Creative Commons.
