Diseñan estudiantes del IPN prótesis de brazo robótico de bajo costo
Por Armando Bonilla
Ciudad de México. 20 de diciembre de 2018 (Agencia Informativa Conacyt).- Alumnos del Centro de Estudios Científicos y Tecnológicos Juan de Dios Bátiz Paredes (Cecyt 9) del Instituto Politécnico Nacional (IPN) desarrollaron un prototipo de prótesis de brazo robótico.

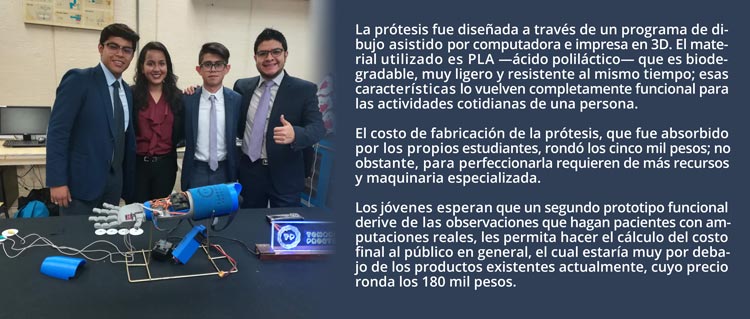
Se trata de Andrea Elizabeth González García, Fernando Ramírez Islas y Benjamín Eliezer González Genis, egresados del Cecyt 9, quienes desarrollaron la tecnología llamada Tomorrows Prosthesis como una alternativa para aquellas personas de bajos recursos que sufrieron alguna amputación.
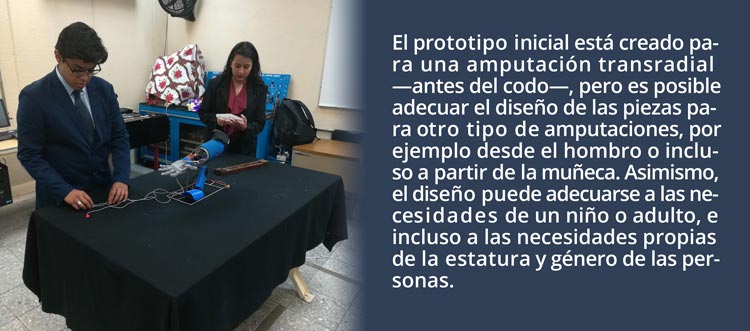
El prototipo funcional está en una etapa de perfeccionamiento. Para ello, los jóvenes estudiantes se encuentran en pláticas con el Instituto Nacional de Rehabilitación en busca de un acuerdo de colaboración que les permita probar su innovación en pacientes con amputaciones.
“El objetivo es probar la prótesis robótica en pacientes con amputaciones reales y que sean ellos quienes propongan las mejoras que se pueden hacer a partir de su experiencia al usarla”, dijo a la Agencia Informativa Conacyt el profesor investigador Irving Eleazar Pérez Montes, uno de los asesores del proyecto.
Impulsos eléctricos y algoritmos
 La prótesis robótica, desarrollada durante su último semestre en el Cecyt, funciona con base en energía mioeléctrica, aquella que proviene de los impulsos eléctricos que emite el cerebro al tensar un músculo. Para ello cuenta con una serie de electrodos que se colocan en el muñón del usuario de la prótesis.
La prótesis robótica, desarrollada durante su último semestre en el Cecyt, funciona con base en energía mioeléctrica, aquella que proviene de los impulsos eléctricos que emite el cerebro al tensar un músculo. Para ello cuenta con una serie de electrodos que se colocan en el muñón del usuario de la prótesis.
Un algoritmo que los jóvenes desarrollaron para su prótesis se encarga de captar e interpretar las señales y convertirlas a través de diversos sensores en el movimiento de la mano o el brazo —a partir del codo en esta primera versión del prototipo—, e incluso el algoritmo y los sensores identifican la intensidad y fuerza del movimiento.
“Tomorrows Prosthesis cuenta con tres electrodos, uno detecta cuando un músculo está tenso, mientras que los dos restantes detectan la velocidad e intensidad con que el pulso eléctrico llega a los sensores. Al ser detectados, el sensor mioeléctrico filtra y amplifica las señales para después enviarlas a un controlador”, explicó Fernando Ramírez Islas, quien actualmente estudia control y automatización en la Escuela Superior de Ingeniería Mecánica y Electricidad (ESIME), unidad Zacatenco.
A su vez, Benjamín Eliezer González Genis, estudiante de la ESIME en la actualidad, explicó que algunas de las señales también son almacenadas porque el algoritmo que desarrollaron permite que la prótesis se familiarice con la actividad eléctrica del usuario, con la finalidad de generar una respuesta más intuitiva entre más sea usada, es decir, aprende de cada uno de sus usuarios.
“Para generar el movimiento de las manos, el sensor envía señales PWM —moduladas por ancho de pulso— a una serie de servomotores que las transforman en movimiento a través de un sistema de tensores”.
La versión inicial del prototipo funcional cuenta con tres grados de libertad, es decir, es capaz de realizar tres tipos de movimientos, uno para abrir y cerrar los dedos de la mano —del meñique al índice—, mientras que un segundo es el del pulgar, que es capaz de moverse hacia adentro y hacia afuera, y el tercero es el del antebrazo.
“El algoritmo permite escalar las lecturas de los movimientos. Cuando se identifica una señal alta, la prótesis realizará un movimiento más intenso, en cambio una señal más baja derivará en un movimiento más sutil. Por ejemplo, el movimiento para tomar una cuchara requiere menos intensidad que el utilizado para levantar un vaso con agua”, dijo a la Agencia Informativa Conacyt, Andrea Elizabeth González García.
 Descargar fotografías.
Descargar fotografías.
![]() Ver texto en pdf.
Ver texto en pdf.

Esta obra cuyo autor es Agencia Informativa Conacyt está bajo una licencia de Reconocimiento 4.0 Internacional de Creative Commons.
