El brazo robótico de Christian Peñaloza
Por Armando Bonilla
Ciudad de México. 1 de abril de 2019 (Ciencia MX).- Una interfaz cerebro-computadora, que será utilizada para estudiar, entrenar y ampliar las capacidades físicas y cognitivas de los humanos, fue desarrollada por el doctor en neurociencia cognitiva aplicada a la robótica Christian Peñaloza.
En entrevista, el joven mexicano que actualmente labora como investigador del Advanced Telecommunications Research Institute International (ATR) en Kioto y la Universidad de Osaka, en Japón, explicó que como parte del trabajo que realiza en el laboratorio de robótica inteligente del doctor Hiroshi Ishiguro, lidera el desarrollo de interfaces cerebro-máquina avanzadas.
“Se trata de interfaces cerebro-máquina, sistemas que funcionan con electrodos que, al ser colocados en la cabeza de las personas, son capaces de leer las ondas cerebrales, interpretarlas y convertirlas en acciones específicas a través de sofisticados algoritmos computacionales, es decir, inteligencia artificial”.
Este proyecto en particular no se limitó a la creación de la interfaz, sino que incluyó desarrollo tecnológico —un brazo robótico con apariencia humana— adecuado al principal objetivo trazado por el doctor Christian Peñaloza, que consiste en ampliar las capacidades físicas y cognitivas —habilidades motrices— de los seres humanos.
“Esta tecnología ya es utilizada para personas con discapacidades motrices, por ejemplo, la falta de una extremidad que es suplida con brazos o piernas robóticas controladas con la mente; no obstante, lo que estamos haciendo en este laboratorio va mucho más allá y estamos buscando que las personas aumenten sus capacidades físicas y sean capaces de controlar un tercer brazo al mismo tiempo que utilizan sus dos extremidades”.
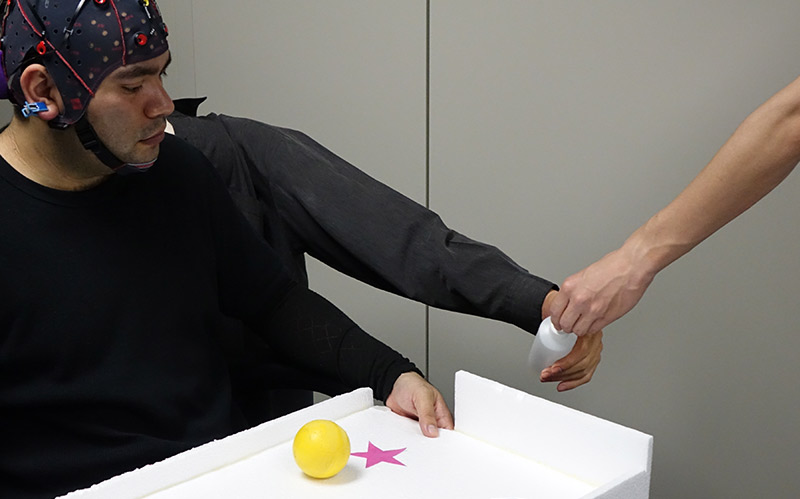
Actualmente, el doctor ya cuenta con una interfaz con esas capacidades y logró, a través de una serie de experimentos, que usuarios controlaran el brazo robótico al mismo tiempo que utilizaban sus propios brazos para balancear una pelota sobre una tabla.
|
“Cuando solicité apoyo al Conacyt, se me negó en cinco ocasiones la ayuda, pero eso no me desanimó y hoy en día estoy entregando resultados que actualmente llevo a mi país a través de nueva tecnología desarrollada en mi empresa mexicana Mirai Innovation, donde apoyo la formación de nuevos estudiantes e investigadores, y trato de contribuir al crecimiento tecnológico de México.” Christian Peñaloza |
“Los resultados de ese experimento fueron publicados en la revista Science Robotics a través del artículo titulado BMI control of a third arm for multitasking; toda vez que se trata de la primera interfaz cerebro-máquina en el mundo que permite aumentar las capacidades físicas y cognitivas de una persona de ese modo, de volverlo multitareas y cuyas potenciales aplicaciones son muchas”.
A decir del investigador, el desarrollo de esta interfaz le tomó alrededor de dos años ya que el proyecto incluye una profunda investigación en neurociencias para entender el funcionamiento del cerebro, una etapa de desarrollo de la tecnología y una etapa de experimentación que sirvió para probar la interfaz pero también para recopilar data neural que se utiliza en el perfeccionamiento del algoritmo.
Del cerebro al robot
El primer paso consiste en colocar los electrodos en ubicaciones específicas de la cabeza —relacionadas con la actividad motriz—. Una vez que la persona realiza una acción, las ondas cerebrales son captadas por el algoritmo para medir cómo se manifiesta la actividad eléctrica.
Esta parte es de entrenamiento para el algoritmo y a ello le sigue una etapa de adaptación por parte del usuario para ayudarlo a controlar una tercera extremidad. De acuerdo con el investigador, al usuario se le pide balancear una pelota sobre una tabla y al mismo tiempo imaginar que realiza una acción diferente con otro brazo, en este caso sujetar una botella.
“En esta etapa medimos la diferencia de patrones que se registra cuando la persona realiza una tarea e imagina una segunda que demanda el uso de otra extremidad. Esa información la usamos en el desarrollo del algoritmo para asignarle un comando que le indique que el robot se debe mover de acuerdo con la imaginación de la persona”.
En una primera fase, se logró que el robot sujetara la botella mientras que el usuario hacía la actividad paralela de balancear la pelota, pero en una segunda etapa del proyecto, se perfeccionó la tecnología, se dotó de una cámara al brazo robótico y se modificó el algoritmo para ayudarlo a reconocer diversos objetos y que adecuara la posición de la mano para agarrar el objeto con respecto a su forma y tamaño.
“El impacto a futuro creemos puede ser muy grande porque nos permitirá generar tecnología que controlemos con el cerebro al mismo tiempo que realizamos otra actividad, por ejemplo, apagar la luz de la casa solo con pensarlo, mientras tomamos las llaves y nos dirigimos a la puerta”.
| Los resultados de esta investigación fueron publicados en julio de 2018 en la revista Science Robotics, bajo el título BMI control of a third arm for multitasking. |

Esta obra cuyo autor es Ciencia MX está bajo una licencia de Reconocimiento 4.0 Internacional de Creative Commons.
