Robótica submarina para explorar arrecifes coralinos
Por Nistela Villaseñor
México, DF. 1 de septiembre de 2015 (Agencia Informativa Conacyt).- El Centro de Investigación y de Estudios Avanzados (Cinvestav) unidad Saltillo del Instituto Politécnico Nacional (IPN), a través del área de Robótica y Manufactura Avanzada, continúa el desarrollo de la investigación en robótica submarina con un proyecto que implica tomar videos de los arrecifes coralinos de Mahahual, Quintana Roo, con el objetivo de conocer las condiciones de estos ecosistemas, afirmó la investigadora Luz Abril Torres Méndez.

Se trata de un proyecto vigente del Consejo Nacional de Ciencia y Tecnología (Conacyt) que utiliza sistemas robóticos acuáticos cognitivos que, a su vez, involucran la transferencia de habilidades motoras perceptivas de humanos, así como de sistemas biológicos marinos, al robot para ejecutar la exploración submarina.
Estudiar los arrecifes coralinos involucra saber qué acontece en ese ambiente, dado que muchos organismos marinos ayudan a que el ecosistema en general funcione, afirmó 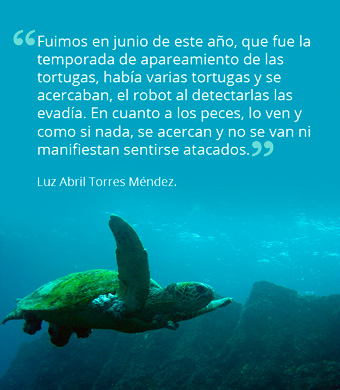 Torres Méndez quien es doctora en Ciencias de la Computación por la Universidad McGill y miembro del Sistema Nacional de Investigadores (SNI) nivel I.
Torres Méndez quien es doctora en Ciencias de la Computación por la Universidad McGill y miembro del Sistema Nacional de Investigadores (SNI) nivel I.
La transferencia de habilidades está relacionada con los procesos que utiliza una persona —y animal marino, en este caso— para moverse sin darse cuenta, expresó la especialista. “Es decir, lo que hacemos naturalmente y de manera inmediata; vemos qué nos llama la atención, hacia dónde queremos ir y con base en eso nos vamos moviendo”, detalló.
Es lo mismo con el robot en el agua, indicó la doctora. Primero tiene que utilizar un conjunto de algoritmos basados en información visual, en tiempo real, que le indique el objeto que le llame la atención; posteriormente, detectar a dónde se va a dirigir y, finalmente, hacerlo evadiendo obstáculos y evitando colisionar con el ambiente que es delicado.
“Para eso hacemos modelos de atención visual e incorporamos información del color. Son sistemas basados en cómo el cerebro se activa con ciertas características”, dijo Torres Méndez.
El color implica tener una condición de visibilidad adecuada, lo cual no es muy común en ambientes acuáticos, pues es una de las características que se pierden; en algunas imágenes se ve muy azul o muy verdoso, dependiendo del color del agua y las partículas que están en el ambiente, aseguró la experta.
“Los modelos de atención visual que utilizamos nos ayudan a extraer colores, a pesar de que de manera directa en las imágenes capturadas por las cámaras del robot no se observan”, abundó.
Mexibot
 Torres Méndez y su equipo han hecho pruebas con Mexibot —un robot anfibio de aluminio con algunas partes de acero, con hardware canadiense y software mexicano— en Mahahual, Quintana Roo, lugar donde se encuentra el segundo arrecife coralino más grande del mundo. “Empezamos con pruebas en alberca. Es un proceso de varias semanas antes de irnos al arrecife. Es la parte que más me apasiona”.
Torres Méndez y su equipo han hecho pruebas con Mexibot —un robot anfibio de aluminio con algunas partes de acero, con hardware canadiense y software mexicano— en Mahahual, Quintana Roo, lugar donde se encuentra el segundo arrecife coralino más grande del mundo. “Empezamos con pruebas en alberca. Es un proceso de varias semanas antes de irnos al arrecife. Es la parte que más me apasiona”.
"Mexibot tiene aletas y no es tan ruidoso porque solo usa cámaras y sensores internos para saber sus orientaciones", dijo la doctora Torres. La grabación que hace es en tiempo real, pero se puede ver hasta que sacan el robot y obtienen los datos de las computadoras.
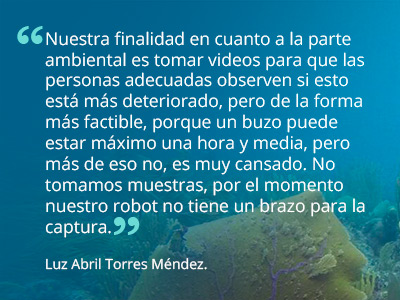
Mexibot puede estar hasta cuatro horas bajo el mar. “Obviamente no lo podemos dejar porque es un riesgo, hay factores que están fuera de control; es un ambiente muy delicado, son seres vivos muy pequeños. Uno dijera que no pasa nada, pero sí, hay que tener esa precaución”, enfatizó Torres Méndez.
Torres Méndez admitió que pese a que se eligieron zonas del arrecife coralino que tal vez no sean de tanto interés para un biólogo —para hacer las pruebas de los algoritmos—, los videos captados por Mexibot sí son de interés porque se han podido percibir algunos cambios en el fondo del mar.
Lo difícil es encontrar una zona explorada tiempo atrás; al ser un ambiente sin una estructura “normal” es complicado y se requiere de un mapa para identificar dicha zona, advirtió. “Estamos en eso: realizar un mapa del arrecife coralino de Mahahual para ver de manera más eficiente esos cambios, sin dañar el ambiente ni ser invasivos”.
La especialista dijo que, a la par, ella y su equipo de investigación están desarrollando un proyecto que amplíe el campo de visión de las cámaras del robot para tener más acciones al respecto de lo que está observando, y que tenga visión no solo al frente sino también atrás.


Esta obra cuyo autor es Agencia Informativa Conacyt está bajo una licencia de Reconocimiento 4.0 Internacional de Creative Commons.
