Robótica aplicada al rescate y la medicina
Por Nistela Villaseñor
México, DF. 20 de mayo de 2015 (Agencia Informativa Conacyt).- Cuando las personas que ahora tienen 20 años sean ancianos, no van a existir suficientes jóvenes para mantener la productividad de las naciones, además de que debido al cambio climatológico van a surgir cataclismos de diferente índole porque la naturaleza busca siempre su equilibrio, consideró Víctor Javier González Villela, doctor en Mecatrónica.
El científico mexicano, quien cursó estudios en la Universidad de Loughborough, Inglaterra, dijo que por ello “es importante que haya robots que asistan no nada más a la gente mayor, sino que suplan actividades como enfermería, asistencia médica o servicios en casa”.
 En entrevista, manifestó que es muy probable que el motor económico del futuro sea la robótica, como hoy lo son las telecomunicaciones. Robots industriales, caseros y de rescate por la realidad que se avecina, dijo.
En entrevista, manifestó que es muy probable que el motor económico del futuro sea la robótica, como hoy lo son las telecomunicaciones. Robots industriales, caseros y de rescate por la realidad que se avecina, dijo.
La meta del investigador y su equipo de trabajo es resolver la interrogante sobre cómo podemos hacer que los robots puedan convivir, coexistir y cooperar con el ser humano en el futuro. Para González Villela, la respuesta está en la robótica intuitiva, adaptable, reactiva, híbrida y móvil.
Robótica intuitiva
Los robots con fines de rescate y medicina tienen que responder rápido a acciones específicas sin tener que pensar demasiado, destacó el especialista.
“Hay pocos investigadores en el mundo que están hablando sobre intuición artificial, pero no la han bajado a conocimiento o todavía no tienen modelos. Solamente la percibieron”, aseveró el doctor González Villela.
Manifestó que la inteligencia artificial hasta ahora ha tocado temas de raciocinio más que de intuición: “El robot se pregunta qué le conviene hacer si tiene que llegar a un lugar en específico. ¿Voy por aquí o por allá? Hay ene soluciones. Después de valorar las posibles soluciones primero da un algoritmo de búsqueda y luego uno de selección; escoge los mejores y genera la solución. Eso le toma tiempo. Es la parte del raciocinio”.
 En el caso de la intuición se opera rápido, indicó González Villela; es efectiva y prácticamente no hace uso de procesos cognitivos o de la razón, como en el caso de la toma de decisiones.
En el caso de la intuición se opera rápido, indicó González Villela; es efectiva y prácticamente no hace uso de procesos cognitivos o de la razón, como en el caso de la toma de decisiones.
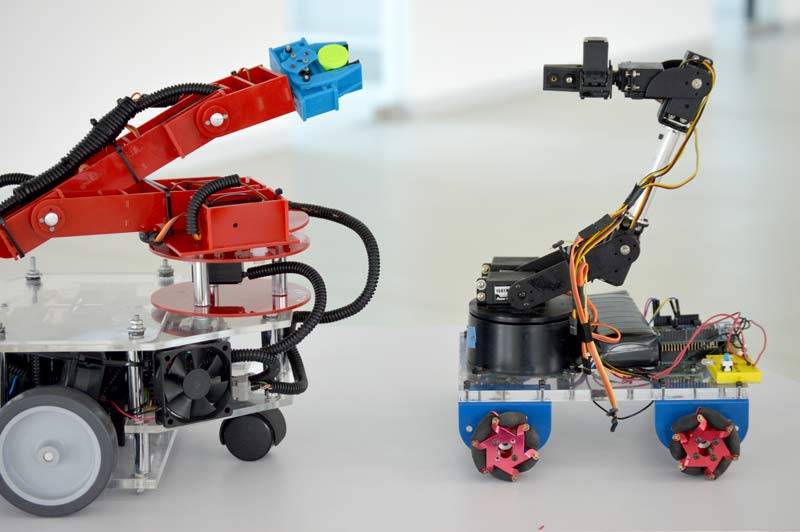
En palabras del científico, quien es miembro nivel I del Sistema Nacional de Investigadores (SNI) del Consejo Nacional de Ciencia y Tecnología (Conacyt), la robótica intuitiva es la que capta y modela la intuición humana para después programarla en sistemas técnicos. Por ejemplo, “para el transporte de materiales se captó la intuición y se le programó a un robot, en este caso para la teleoperación”, dijo.
Sin embargo, la tendencia en específico es hacia la cirugía, manifestó el especialista en robótica. “Se captan las intuiciones de los cirujanos para hacer ciertas acciones y se programan los algoritmos de tal manera que el propio robot sabe qué tiene que hacer si lo acercan a cierto órgano o a cierta pieza, porque le transmitimos algo de intuición, no toda; queda parte en el operario y parte en el robot”, indicó.
“Con imagenología tengo la disposición de órganos y sé dónde se tiene que hacer la intervención. Lo que se hace hoy en día con la laparoscopía es usar una cámara e instrumentos quirúrgicos para intervenir al paciente. En un futuro se espera que con el uso de la imagenología se planeen las rutas de acceso a los sitios de intervención y que el cirujano solamente vaya guiando a los instrumentos quirúrgicos (robot quirúrgico) conforme a este plan, de tal manera que no tenga que concentrarse demasiado, ya que puede hacer uso de la intuición de los expertos porque esta ya fue programada en los algoritmos del robot”, describió el experto.
 Como lo señaló el doctor González Villela, también hay una concepción para el transporte de materiales que es lo que le interesa a él y a su equipo de trabajo conformado por estudiantes de licenciatura, maestría y doctorado. “Ya sea en casa, oficina u hospital. A lo mejor no se llama material sino que se llama plato, tenedor, etcétera”, mencionó.
Como lo señaló el doctor González Villela, también hay una concepción para el transporte de materiales que es lo que le interesa a él y a su equipo de trabajo conformado por estudiantes de licenciatura, maestría y doctorado. “Ya sea en casa, oficina u hospital. A lo mejor no se llama material sino que se llama plato, tenedor, etcétera”, mencionó.
Si el robot puede transportar material, también puede utilizar esos algoritmos para hacer tareas específicas; a lo mejor cortar carne u otra cosa para asistir a gente de edad avanzada o con complicaciones motoras, abundó el especialista.
Robótica adaptable
“Ayer volví a ver la película del tsunami. En una zona de desastre, los modelos a los que llamo globales –que permanecen estáticos, de larga duración– desaparecen; no tenemos el plano”, aseguró González Villela.
 Explicó que en el rescate encontramos normalmente un medio caótico donde lo temporal empieza a tomar sentido. Y esa parte, agregó, puede que haya cambiado de forma y tamaño, o que ya no existan los accesos que había pero se crearon otros.
Explicó que en el rescate encontramos normalmente un medio caótico donde lo temporal empieza a tomar sentido. Y esa parte, agregó, puede que haya cambiado de forma y tamaño, o que ya no existan los accesos que había pero se crearon otros.
Por ello, si se diseñan robots con sistemas capaces de cambiar la dimensión de sus eslabones, estos pueden adaptarse a diferentes ambientes para hacer actividades como ser cuadrúpedo, bípedo o, en un momento dado, hasta un delfín, destacó el investigador.
“¿Qué tal si un robot tiene que meterse debajo de una mesa, en un agujero, empequeñecerse o nadar para rescatar a alguien? Pues que cambie su morfología: que reduzca su tórax o se convierta en una especie de víbora si es necesario. La topología no va a cambiar porque es cómo está interconectado, pero el tamaño sí”, detalló.
Como un Transformer, dijo, que no modifica sus dimensiones. Los Transformers se reacomodan; los robots adaptables podrían modificar parcialmente las dimensiones de los elementos dentro de una mínima y una máxima dimensión. Esto podrá ayudar al robot a ubicarse en diferentes ambientes y ahorrar energía para realizar ciertas tareas de mejor forma, manifestó González Villela.
Robótica reactiva, híbrida y móvil
 En palabras del especialista, la reacción en robótica tiene que ver con conservar el equilibrio, usar los reflejos y la fuerza.
En palabras del especialista, la reacción en robótica tiene que ver con conservar el equilibrio, usar los reflejos y la fuerza.
Lo anterior para que el robot no se vaya a patinar o caer si tiene que forcejear cuando encuentre a una persona que necesita ayuda, por ejemplo un anciano caído o una persona en situación de rescate, explicó el especialista.
Ahora bien, en cuanto a la robótica híbrida, el doctor González Villela detalló: “Aunque hay quienes ya están mezclando cuestiones de tecnología con vida (células humanas), no es nuestro tema. ‘Híbrido’ es que hay muchos tipos de robots y cuando se juntan o interconectan ya no pueden llamarse igual, porque pueden estar usando diferentes tipos de energías o diferentes tipos de configuraciones. No es neumático o eléctrico solamente; no es serial, ni paralelo, ni tampoco solamente móvil, a eso se refiere la hibridez”.
Por último, el especialista hizo referencia a la robótica móvil, y manifestó que hay varias formas de desarrollos al respecto: bípedos, cuadrúpedos, con llantas, aire, drones o submarinos.
“La movilidad se refiere a poder moverme en una línea, que sería una dimensión; en un plano o superficie, que son dos dimensiones; o en el espacio, que incluye aire, agua y tierra, por si va a escavar”, finalizó.

Esta obra cuyo autor es Agencia Informativa Conacyt está bajo una licencia de Reconocimiento 4.0 Internacional de Creative Commons.
